Making Deep-Sea Underwater Robots more effective: Successful field trials in the Mediterranean Sea
July 25, 2017
Robotics experts from Jacobs University work together with European colleagues on an EU-funded project to add more automated functions to underwater robots used in the deep-sea, e.g., for scientific exploration or in off-shore oil and gas production. Named “Effective Dexterous ROV Operations in Presence of Communications Latencies (DexROV)”, the project is funded by the EU within the H2020 framework in the area “Bluegrowth”. The consortium, which is helmed by the Belgian company Space Applications Services, consists in seven partners from six countries, of which four are companies and three are research institutions.
Underwater robots known as Remotely Operated Vehicles (ROV) are nowadays essential for all activities in deeper waters that are not accessible by divers. A typical workclass ROV is a van-sized submarine robot equipped with two powerful arms and a very long cable that connects it to a surface ship and carries both datalinks and power. It is controlled by teleoperation, i.e., the operators manually drive the vehicle and the arms via several joysticks.
The operation of a ROV hence requires significant off-shore specialized manpower – such a setup typically needs a crew consisting of at least an intendant, an operator, and a navigator who operate the ROV from a support vessel. This is a baseline and extra staffing is often provisioned. Furthermore, additional experts often need or wish to be physically present at the off-shore location, in order to advise on or to observe the course of the operations. Associated costs are very high. In order to reduce the burden of operations at the offshore side, the EU research project “Effective Dexterous ROV Operations in Presence of Communications Latencies (DexROV)” develops proofs of concept for more cost-effective and time-efficient ROV operations, during which automated functions are added and manned support is to a large extent distributed onshore, i.e., from a ROV control center, possibly at a large distance from the actual operations.
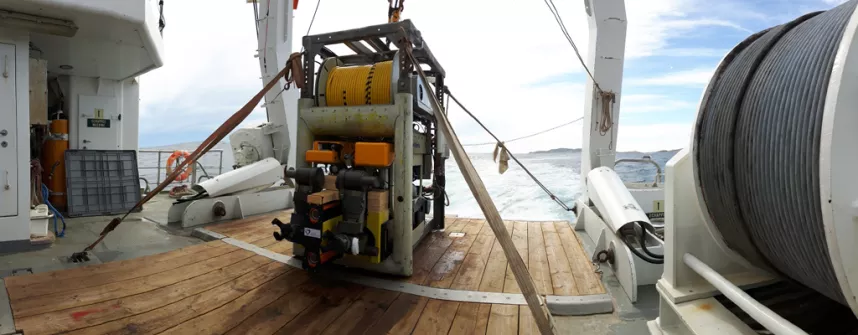
The outcomes of the project are integrated and assessed in a series of tests and evaluation campaigns, of which the first sea trials now took place from June 26 to July 07, 2017 in the Mediterranean sea by Marseille. The trials involved the ship Janus-II of the project partner COMEX that is equipped with an according robot, which got supplemented with two robotic arms from the project partner Graaltech and an intelligent vision system from Jacobs University. The robot, its arms and the perception system were linked from the vessel via satellite to a mission control center operated by the project partner Space Applications Services in Brussels.
The Jacobs Robotics Group develops 3D perception and 3D world modelling software in the DexROV project to support driver assistance functions for the ROV pilots and to provide off-shore virtual reality presence. The 3D perception is based on an underwater stereo vision system that was developed at Jacobs University in the first project year, among others by developing suited hardware that can stand the immense water pressure in the deep-sea. The system has substantial onboard computer power to allow direct processing of the data on the robot.
Data from this sensor system gets for example directly processed during the mission into 3D maps that assist the operators in their work and allow external experts a virtual reality presence on the site. This can among others be of interest in scientific missions to allow experts on shore to participate as if they were on board of the ship to give input to optimize the further planning and execution of the mission.
In addition, Jacobs Robotics develops advanced perception methods that enable ROVs to carry out tasks in a (semi-)autonomous manner instead of being manually tele-operated by a whole crew of highly specialized pilots. This includes for example turning valves at christmas trees with the arms of an ROV – a task which currently still has to be done through manual teleoperation many times a day during oil- and gas-production. Christmas trees – their name is derived from their shape that loosely looks like a decorated tree – are assemblies of pipes, valves, and fittings that provide access to a well and controls the oil or gas flow. For each reservoir, dozens of interconnected Christmas trees are used that need to be constantly maintained by underwater operations.
The two weeks of DexROV sea trials now were very successful. “We are pleased that our hardware components and our software worked very robustly under the harsh conditions of the sea trials” says Prof. Dr. Andreas Birk, the leader of the Jacobs Robotics group. And he adds with a smile: “We also had one day of quite rough weather, which highlighted why a remote presence can also be interesting for experts - it eases not only logistics and reduces costs, it is also much more convenient to participate remotely then being on a very shaky ship”.
More information:
http://robotics.jacobs-university.de/people/birk
Questions will be answered by:
Dr. Andreas Birk | Professor of Computer Science & Electrical Engineering
a.birk [at] jacobs-university.de | Tel.: +49 421 200-3113
Receive all updates straight to your inbox.