Robotics
Group leader

Specific themes and goals
Machine perception is essential for the operation of intelligent systems. It allows robots to recognise objects and locate them in space, as well as undertake automated world-modeling, such as generating maps. But many state-of-the-art methods are designed to operate in benign conditions. This makes them ill-suited to applications in which, for example, sensors can only deliver poor quality, noisy data or in environments with few or ambiguous structures. There are many possible reasons for these limitations, ranging from the quality of the sensors through to the environment the robot is operating in. Our group investigates and develops robust methods to cope with these limitations.
Highlights and impact
- The group developed and improved methods to represent, recognize, and localize objects. Among others, we derived a numerically stable formulation for superquadrics, which are a special family of 3D shapes. They are particularly important when training machines to perceive curved surfaces. Our results were published in the highest-ranking journal in the field of Artificial Intelligence, IEEE Transactions on Pattern Analysis and Machine Intelligence.
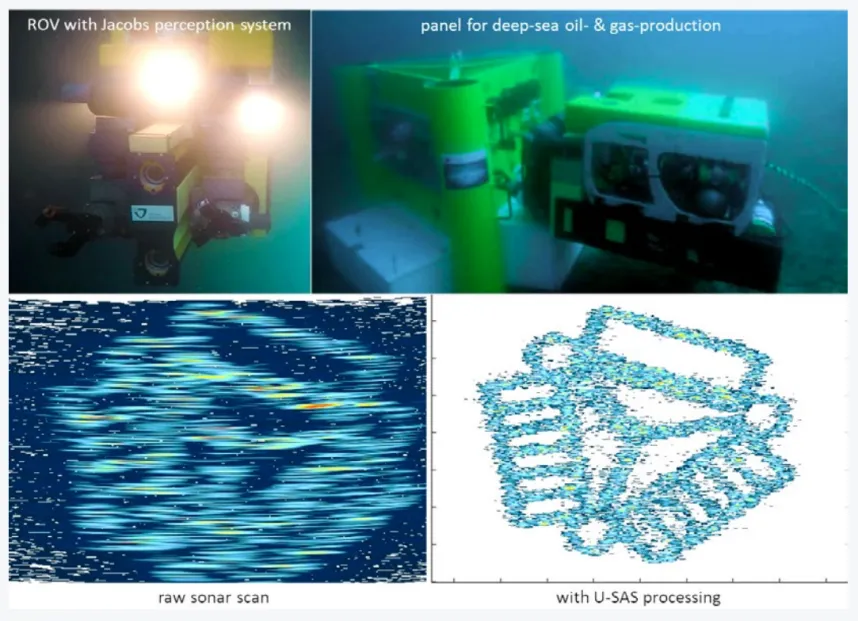
- In ongoing research, we are developing a novel way to process sonar data. Sonar is an essential sensor for underwater applications as it provides data under bad or even no visibility conditions and over longer distances. But its spatial resolution depends on a combination of factors. The current state-of-the-art synthetic aperture sonar (SAS) has a number of constraints on the way it can be used. We developed an unconstrained version for the processing of synthetic aperture sonar (U-SAS), which can be computed on arbitrary trajectories and without navigation sensor data. The U-SAS leads to higher quality sonar images without the constraints of the current systems. The innovation could render very costly additional navigation sensors redundant and enable sonar-carrying vehicles to conduct more complex missions.
- An international survey showed that during the COVID pandemic, robotics and automation instructors switched to online education even for lab courses and other hands-on activities. While this method had its drawbacks, instructors felt that several aspects of online education boosted learning, and should be retained going forward. The results are published in Robotics and Automation.
Group composition & projects/funding
- Our U-SAS project was financed by the Deutsche Forschungsgemeinschaft (DFG).
- The Bundesministerium für Bildung und Forschung (BMBF) within the eHeritage program funded a project which created a 3D digitization of the memorial Submarine Bunker Valentin with air-, ground-, and underwater-robots. On the technological side, the project was interesting due to the size of the object and its complex structures, including among others flooded basement areas that are completely inaccessible — even for professional human divers.
- The group undertook three research projects related to education in the context of the B3 program of the Jacobs Foundation. An important goal was to explore the prospects and limits of online education, especially in the context of laboratory and other hands-on education.
- In the time covered in this report, the group had two postdocs and six PhD students.
Selected publications
- Andreas Birk. Seeing through the forest and the trees with drones: Signal-processing of thermal images that are autonomously collected by a drone detects people in densely occluded forests. Science Robotics, 6(55)
- Arturo Gomez Chavez, Andrea Ranieri, Davide Chiarella, Andreas Birk. Underwater VisionBased Gesture Recognition - A Robustness Validation for Safe Human-Robot Interaction. IEEE Robotics and Automation Magazine (RAM), 28 (3), pp. 67- 78, DOI: 10.1109/ MRA.2021.3075560, 2021
- Madhura Thosar, Christian A. Mueller, Georg Jäger, Johannes Schleiss, Narender Pulugu, Ravi Mallikarjun, Sai Vivek Rao Jeevangekar, Andreas Birk, Max Pfingsthorn, Sebastian Zug. From a Multimodal Property Dataset to Robot-centric Conceptual Knowledge About Household Objects. Frontiers in Robotics and AI, 2021
- Andreas Birk and Dora Simunovic. Robotics Labs and Other Hands-On Teaching During COVID19: Change Is Here to Stay? IEEE Robotics and Automation Magazine (RAM), 28 (4), pp. 92-102, 2021
- Narunas Vaskevicius, Andreas Birk. Revisiting Superquadric Fitting: A numerically stable formulation. IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 41(1), pp.220- 233, 2019