Forscher der Jacobs University steuern Unterwasser-Roboter erstmals durch Zeichensprache
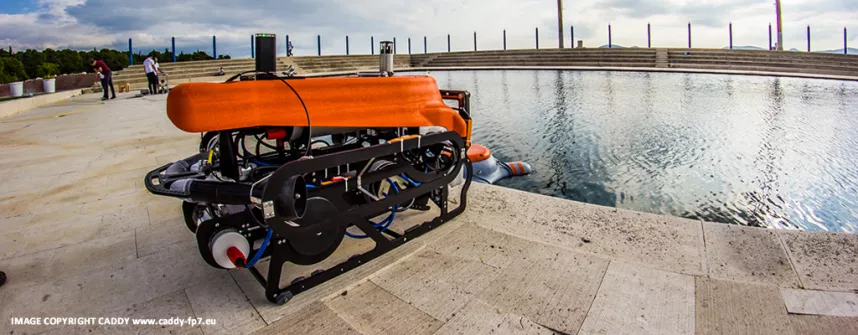
24. November 2015 Archäologische Untersuchungen im Ozean und vergleichbare komplexe Forschungsprojekte unter Wasser sind auf die Unterstützung von Robotern angewiesen, um in oftmals unwegsamem Gelände arbeiten zu können. Wie die Zusammenarbeit zwischen menschlichen Tauchern und Robotern möglichst reibungslos und effektiv ablaufen kann, ist Gegenstand des EU-Projekts CADDY, an dem Andreas Birk, Professor für Elektrotechnik und Informatik an der Jacobs University, mit seinem Team maßgeblich beteiligt ist. Bislang mussten Roboter mit Kabeln verbunden werden, damit sie entsprechende Signale mit Befehlen entgegen nehmen und darauf reagieren können. Die Forscher um Andreas Birk wollen dies jetzt ändern. Hierfür haben sie ein spezielles 3D-Wahrnehmungssystem entwickelt und nun erfolgreich getestet. Der Unterwasser-Roboter Artu vom italienischen Projektpartner Consiglio Nazionale delle Ricerche (CNR) wurde vom Jacobs Team mit einer Stereokamera mit eigener Verarbeitungs- und Auswertungseinheit ausgestattet, die ihm ermöglicht, die Zeichensprache des menschlichen Tauchers zu verstehen und umzusetzen. Um trotz der für Mensch und Technik schwierigen Gegebenheiten den Taucher sowie insbesondere seine Hände erfassen und erkennen zu können, ist das 3D-System des Roboters mit robusten low-level Softwarekomponenten ausgestattet, die in Echtzeit die Bilder verarbeiten und die relevanten Körperteile erkennen und verfolgen. Damit der Roboter die Anordnung der Hände bei der Zeichensprache interpretieren kann, hat die Jacobs Robotics Group weiterhin spezielle high-level Softwarekomponenten entwickelt, die aus der Anordnung der Finger, Hände und Arme einzelne Zeichen wie auch längere Sequenzen von Kommandos erkennen. So kann ein Taucher dem Roboter zum Beispiel signalisieren, dass er ein Foto eines Objekts anfertigen, ihm folgen oder auftauchen soll. Auch komplexere Anweisungen sind möglich wie etwa der Befehl, eine Karte über eine bestimmte Fläche zu erstellen. Eine große Herausforderung für die Forschung sind die Sichtverhältnisse unter Wasser. Die verwendeten Algorithmen müssen sehr robust sein, das bedeutet, sie müssen auch noch mit qualitativ minderwertig und teilweise fehlerhaften Daten funktionieren. Gleichzeitig ist eine hohe Verarbeitungsgeschwindigkeit erforderlich, um die Interpretation der Gesten in Echtzeit zu ermöglichen. „Die Feldversuche in Biograd waren sehr erfolgreich“, so Andreas Birk, „wir sind sehr stolz, dass unser System zur Erkennung von Taucher-Gesten die ersten Tests unter realen Bedingungen so gut bestanden hat. Das öffnet komplett neue Wege für die Unterwasser-Robotik.“ Image courtesy of CADDY: http://www.caddy-fp7.eu/web/35_-1_69_-1_-1_-1_albumi_galerija.aspx Weitere Partner im EU-Projekt CADDY:University of Zagreb – Faculty of Electrical Engineering, Croatia (project coordinator)Consiglio Nazionale delle Ricerche, ItalyInstituto Superior Technico, PortugalJacobs University, GermanyUniversity of Vienna, AustriaUniversity Of Newcastle Upon Tyne, UKDivers Alert Network Europe Foundation – DAN Europe, Malta Fragen beantwortet:Andreas Birk | Professor of Electrical Engineering & Computer Sciencea.birk [at] jacobs-university.de | Telefon: +49-421-200-3113 Kontakt:Kristina Logemann | Brand Management, Marketing & Communicationsk.logemann [at] jacobs-university.de | Tel.: +49 421 200-4454
Subscribe
Receive all updates straight to your inbox.